Chapter 1 Introduction
1.1 What is Nonparametric Statistics?
What is Parametric Statistics?
- Parametric methods are based on probability models that can
be fully described by a fixed number of parameters.
- The number of parameters does not change with the sample size.
- Typical examples include
- Gaussian (2 parameters)
- Poisson (1 parameter)
- Exponential (1 parameter)
- Beta (2 parameters)
- In regression settings where we have pairs of observations
\((x_{1}, Y_{1})\), …, \((x_{n}, Y_{n})\).
- Parametric methods would assume the conditional mean function \(E(Y_{i} | x_{i})\) would be described by a fixed number of parameters.
- For example, \(E(Y_{i}|x_{i}) = \beta_{0} + \beta_{1}x_{i}\).
What is Nonparametric Statistics?
It is difficult to give a concise, all-encompassing definition of nonparametric statistics, but nonparametric statistics generally refers to statistical methods where there is not a clear parametric component.
A more practical definition is that nonparametric statistics refers to flexible statistical procedures where few assumptions are made regarding the distribution of the data or the form of a regression model.
The uses of nonparametric methods in several common statistical contexts are described in Sections 1.3 - 1.7.
1.2 Outline of Course
The topics in this course are roughly divided into the following 5 categories. The plan is to describe nonparametric methods for 5 main themes in statistical inference.
- Nonparametric Testing
- Rank-based Tests
- Permutation Tests
- Estimation of Basic Nonparametric Quantities
- The Empirical Distribution Function
- Density Estimation
- Nonparametric Confidence Intervals and Prediction Intervals
- Bootstrap
- Conformal Inference
- Nonparametric Regression Part I (Smoothing Methods)
- Kernel Methods
- Splines
- Local Regression
- Nonparametric Regression Part II (Machine Learning Methods)
- Decision Trees/CART
- Ensemble Methods (boosting)
1.3 Example 1: Nonparametric vs. Parametric Two-Sample Testing
Suppose we have data from two groups. For example, outcomes from two different treatments.
Group 1 outcomes: \(X_{1}, \ldots, X_{n}\) an i.i.d (independent and identically distributed) sample from distribution function \(F_{X}\). This means that \[\begin{equation} F_{X}(t) = P( X_{i} \leq t) \quad \textrm{ for any } 1 \leq i \leq n \nonumber \end{equation}\]
Group 2 outcomes: \(Y_{1}, \ldots, Y_{m}\) an i.i.d. sample from distribution function \(F_{Y}\). \[\begin{equation} F_{Y}(t) = P( Y_{i} \leq t) \quad \textrm{ for any } 1 \leq i \leq n \nonumber \end{equation}\]
To test the impact of a new treatment, we usually want to test whether or not \(F_{X}\) differs from \(F_{Y}\) in some way. This can be stated in hypothesis testing language as \[\begin{eqnarray} H_{0}&:& F_{X} = F_{Y} \quad \textrm{( populations are the same)} \nonumber \\ H_{A}&:& F_{X} \neq F_{Y} \quad \textrm{( populations are different)} \tag{1.1} \end{eqnarray}\]
Parametric Tests
Perhaps the most common parametric test for (1.1) is the t-test. The t-test assumes that \[\begin{equation} F_{X} = \textrm{Normal}(\mu_{x}, \sigma^{2}) \quad \textrm{ and } \quad F_{Y} = \textrm{Normal}(\mu_{y}, \sigma^{2}) \end{equation}\]
Under this parametric assumption, the hypothesis test (1.1) reduces to \[\begin{equation} H_{0}: \mu_{x} = \mu_{y} \quad \textrm{ vs. } \quad H_{A}: \mu_{x} \neq \mu_{y} \end{equation}\]
The standard t-statistic (with a pooled estimate of \(\sigma^{2}\)) is the following \[\begin{equation} T = \frac{\bar{X} - \bar{Y}}{ s_{p}\sqrt{\frac{1}{n} + \frac{1}{m}} }, \end{equation}\] where \(\bar{X} = \frac{1}{n}\sum_{i=1}^{n} X_{i}\) and \(\bar{Y} = \frac{1}{m}\sum_{i=1}^{m} Y_{i}\) are the group-specific sample means and \(s_{p}^{2}\) is the pooled estimate of \(\sigma^{2}\) \[\begin{equation} s_{p}^{2} = \frac{1}{m + n - 2}\Big\{ \sum_{i=1}^{n} (X_{i} - \bar{X})^{2} + \sum_{i=1}^{m} (Y_{i} - \bar{Y})^{2} \Big\} \end{equation}\]
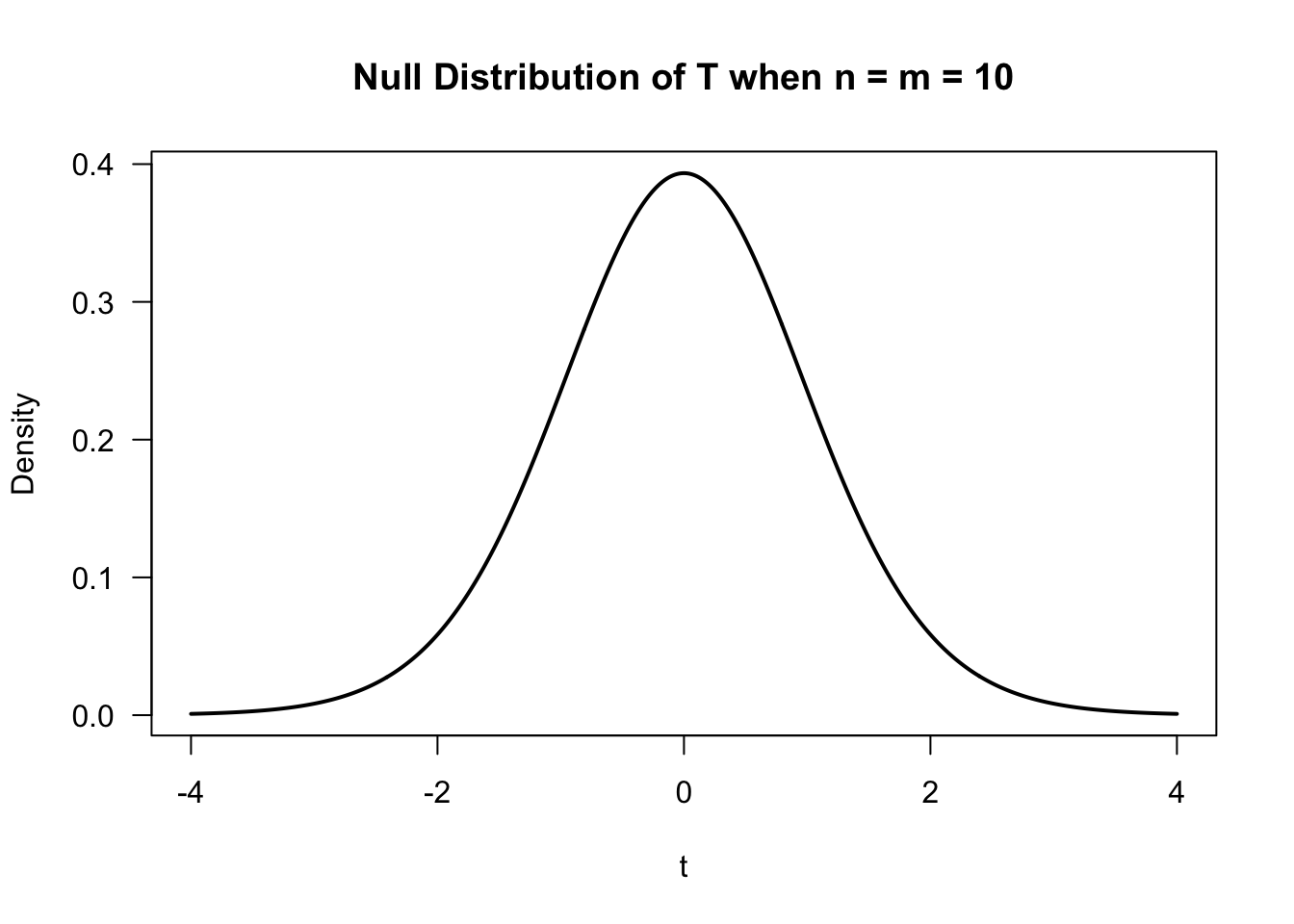
The t-test is based on the null distribution of \(T\) - the distribution of \(T\) under the null hypothesis.
Under the assumption of normality, the null distribution of \(T\) is a t distribution with \(n + m - 2\) degrees of freedom.
- Notice that the null distribution of \(T\) depends on the parametric assumption that both \(F_{X} = \textrm{Normal}(\mu_{x}, \sigma^{2})\)
and \(F_{Y} = \textrm{Normal}(\mu_{y}, \sigma^{2})\).
- Appealing to the Central Limit Theorem, one could argue that is a quite reasonable assumption.
- In addition to using the assumption that \(F_{X} = \textrm{Normal}(\mu_{x}, \sigma^{2})\) and \(F_{Y} = \textrm{Normal}(\mu_{y}, \sigma^{2})\), we used this parametric assumption (at least implicitly) in the formulation of the hypothesis test itself because we assumed that most relevant differences between \(F_{X}\) and \(F_{Y}\) would be fully described by difference in \(\mu_{x}\) and \(\mu_{y}\).
Nonparametric Tests
Two-sample nonparametric tests are meant to be “distribution-free”. This usually means the null distribution of the test statistic does not depend on any parametric assumptions about the two populations \(F_{X}\) and \(F_{Y}\).
Many such tests are based on ranks. The distribution of the ranks under the assumption that \(F_{X} = F_{Y}\) do not depend on the form of \(F_{X}\) (assuming \(F_{X}\) is continuous).
Also, the statements of hypotheses tests for nonparametric tests should not rely on typical parametric assumptions about \(F_{X}\) and \(F_{Y}\).
For example, \(H_{A}: F_{X} \neq F_{Y}\) or \(H_{A}: F_{X} \geq F_{Y}\).
Nonparametric tests usually tradeoff power for greater robustness. + Ranks are much less influenced by the presence of outliers.
In general, if the parametric assumptions are correct, a nonparametric test will have less power than its parametric counterpart.
If the parametric assumptions are not correct, parametric tests might have inappropriate type-I error control or lose power.
1.4 Example 2: Nonparametric Estimation
Suppose we have \(n\) observations \((X_{1}, \ldots, X_{n})\) which are assumed to be i.i.d. (independent and identically distributed). The distribution function of \(X_{i}\) is \(F_{X}\).
Suppose we are interested in estimating the entire distribution function \(F_{X}\) rather than specific features of the distribution of \(X_{i}\) such as the mean or standard deviation.
In a parametric approach to estimating \(F_{X}\), we would assume the distribution of \(X_{i}\) belongs to some parametric family of distributions. For example,
- \(X_{i} \sim \textrm{Normal}(\mu, \sigma^{2})\)
- \(X_{i} \sim \textrm{Exponential}(\lambda)\)
- \(X_{i} \sim \textrm{Beta}(\alpha, \beta)\)
If we assume that \(X_{i} \sim \textrm{Normal}( \mu, \sigma^{2} )\), we only need to estimate 2 parameters to fully describe the distribution of \(X_{i}\), and the number of parameters will not depend on the sample size.
In a nonparametric approach to characterizing the distribution of \(X_{i}\), we need to instead estimate the entire distribution function \(F_{X}\) or density function \(f_{X}\).
The distribution function \(F_{X}\) is usually estimated by the empirical distribution function \[\begin{equation} \hat{F}_{n}(t) = \frac{1}{n}\sum_{i=1}^{n} I( X_{i} \leq t), \end{equation}\] where \(I()\) denotes the indicator function. That is, \(I( X_{i} \leq t) = 1\) if \(X_{i} \leq t\), and \(I(X_{i} \leq t) = 0\) if \(X_{i} > t\).
The empirical distribution function is a discrete distribution function, and it can be thought of as an estimate with \(n\) “parameters”.
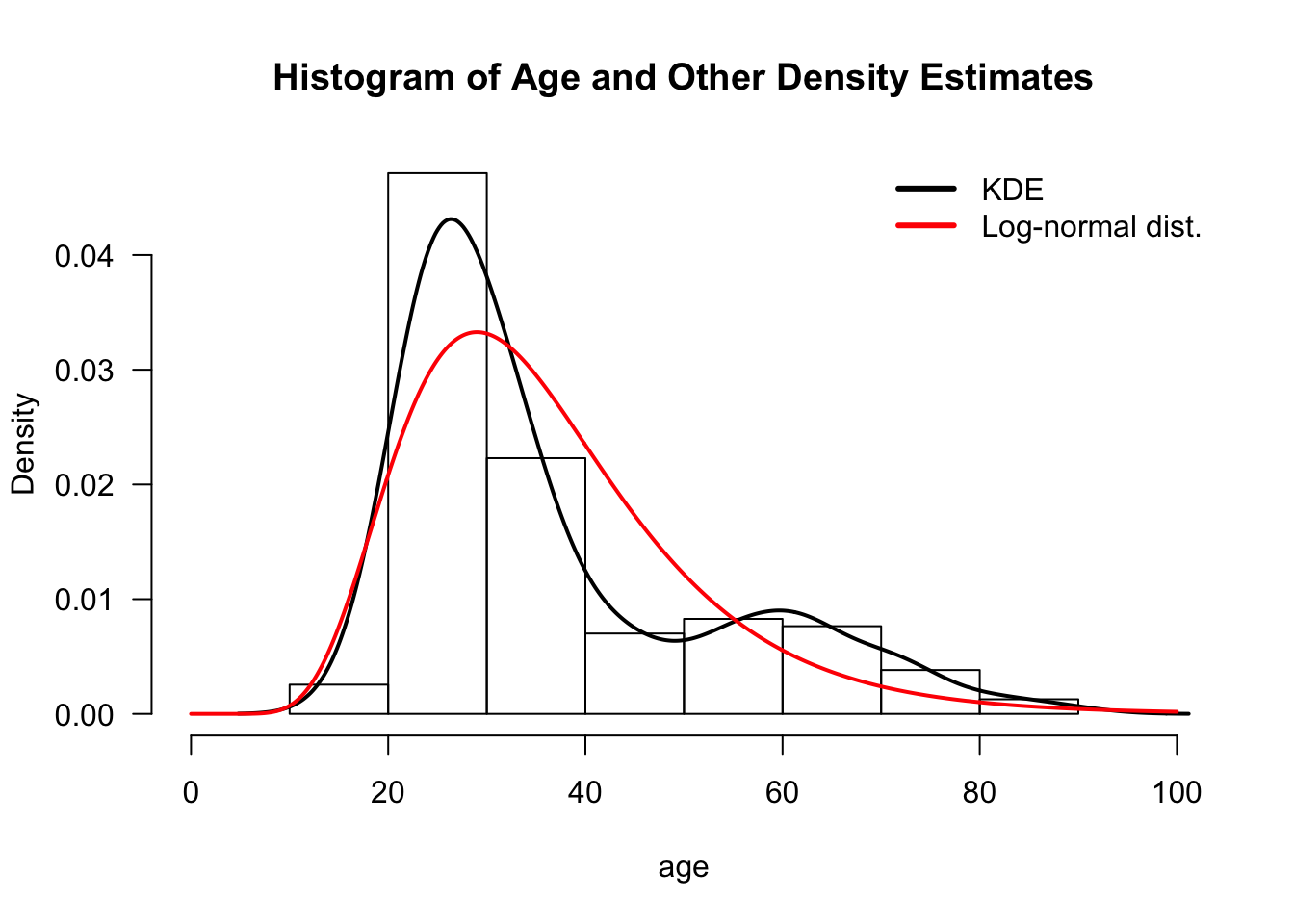
Kernel density estimation is probably the most common nonparametric method for estimating a probability density function \(f_{X}(t) = F_{X}'(t)\).
The density function of \(X_{i}\) is often estimated by a kernel density estimator (KDE). This is defined as \[\begin{equation} \hat{f}_{n}(t) = \frac{1}{n h_{n}} \sum_{i=1}^{n} K\Big( \frac{t - X_{i}}{ h_{n} } \Big). \end{equation}\]
\(K()\) - the kernel function
\(h_{n}\) - the bandwidth
The KDE is a type of smoothing procedure.
The bandwidth \(h_{n}\) is an example of a tuning parameter.
- Tuning parameters are common in many nonparametric estimation methods.
- Choice of tuning parameters involve managing bias-variance tradeoffs appropriately.
1.5 Example 3: Confidence Intervals
Inference for a wide range of statistical procedures is based on the following argument \[\begin{equation} \hat{\theta}_{n} \textrm{ has an approximate Normal}\Big( \theta, \widehat{\textrm{Var}(\hat{\theta}_{n})} \Big) \textrm{ distribution } \tag{1.2} \end{equation}\]
Above, \(\hat{\theta}_{n}\) is an estimate of a parameter \(\theta\), and \(\widehat{\textrm{Var}(\hat{\theta}_{n})}\) is an estimate of the variance of \(\hat{\theta}_{n}\).
\(se_{n} = \sqrt{\widehat{\textrm{Var}(\hat{\theta}_{n})}}\) is usually referred to as the standard error of \(\hat{\theta}_{n}\).
\(95\%\) confidence intervals are reported using the following formula \[\begin{equation} [\hat{\theta}_{n} - 1.96 se_{n}, \hat{\theta}_{n} + 1.96 se_{n} ] \end{equation}\]
Common examples of this include:
- \(\hat{\theta}_{n} = \bar{X}_{n}\).
In this case, appeals to the Central Limit Theorem would justify approximation (1.2). The variance of \(\hat{\theta}_{n}\) would be \(\sigma^{2}/n\), and the standard error would typically be \(se_{n} = \hat{\sigma}/\sqrt{n}\).
- \(\hat{\theta}_{n} = \textrm{Maximum Likelihood Estimate of } \theta\).
In this case, asymptotics would justify the approximate distribution \(\hat{\theta}_{n} \sim \textrm{Normal}(\theta, \frac{1}{nI(\theta)} )\), where \(I(\theta)\) denotes the Fisher information. The standard error in this context is often \(se_{n} = \{ n I(\hat{\theta}_{n}) \}^{-1/2}\).
Confidence intervals using (1.2) rely on a large-sample, parametric approximation to the sampling distribution of the statistic \(\hat{\theta}_{n}\).
Moreover, even if one wanted to use something like (1.2), working out standard error formulas can be a great challenge in more complicated situations.
The bootstrap is a simulation-based approach for computing standard errors and confidence intervals.
The bootstrap does not rely on any particular parametric assumptions and can be applied in almost any context (though bootstrap confidence intervals can fail to work as desired in some situations).
Through resampling from the original dataset, the bootstrap uses many possible alternative datasets to assess the variability in \(\hat{\theta}_{n}\).
| OriginalDat | Dat1 | Dat2 | Dat3 | Dat4 | |
|---|---|---|---|---|---|
| Obs. 1 | 0.20 | 0.20 | 0.80 | 0.20 | 0.30 |
| Obs. 2 | 0.50 | 0.20 | 0.80 | 0.20 | 0.70 |
| Obs. 3 | 0.30 | 0.30 | 0.50 | 0.80 | 0.20 |
| Obs. 4 | 0.80 | 0.30 | 0.70 | 0.50 | 0.50 |
| Obs. 5 | 0.70 | 0.70 | 0.20 | 0.30 | 0.20 |
| theta.hat | 0.50 | 0.34 | 0.60 | 0.40 | 0.38 |
In the above example, we have 4 boostrap replications for the statistic \(\hat{\theta}\): \[\begin{eqnarray} \hat{\theta}^{(1)} &=& 0.34 \\ \hat{\theta}^{(2)} &=& 0.60 \\ \hat{\theta}^{(3)} &=& 0.40 \\ \hat{\theta}^{(4)} &=& 0.38 \end{eqnarray}\]
In the above example, the bootstrap standard error for \(\hat{\theta}_{n}\) would be the standard deviation of the bootstrap replications \[\begin{eqnarray} se_{boot} &=& \Big( \frac{1}{3} \sum_{b=1}^{4} \{ \hat{\theta}^{(b)} - \hat{\theta}^{(-)} \}^{2} \Big)^{1/2} \nonumber \\ &=& \Big( (0.34 - 0.43)^{2}/3 + (0.60 - 0.43)^{2}/3 + (0.40 - 0.43)^{2}/3 + (0.38 - 0.43)^{2}/3 \Big)^{1/2} \nonumber \\ &=& 0.116 \end{eqnarray}\] where \(\hat{\theta}^{(-)} = 0.43\) is the average of the bootstrap replications.
One would then report the confidence interval \([\hat{\theta} - 1.96 \times 0.116, \hat{\theta} + 1.96 \times 0.116]\). In practice, the number of bootstrap replications is typically much larger than \(4\).
It is often better to construct confidence intervals using the percentiles from the bootstrap distribution of \(\hat{\theta}\) rather than use a confidence interval of the form: \(\hat{\theta} \pm 1.96 \times se_{boot}\).
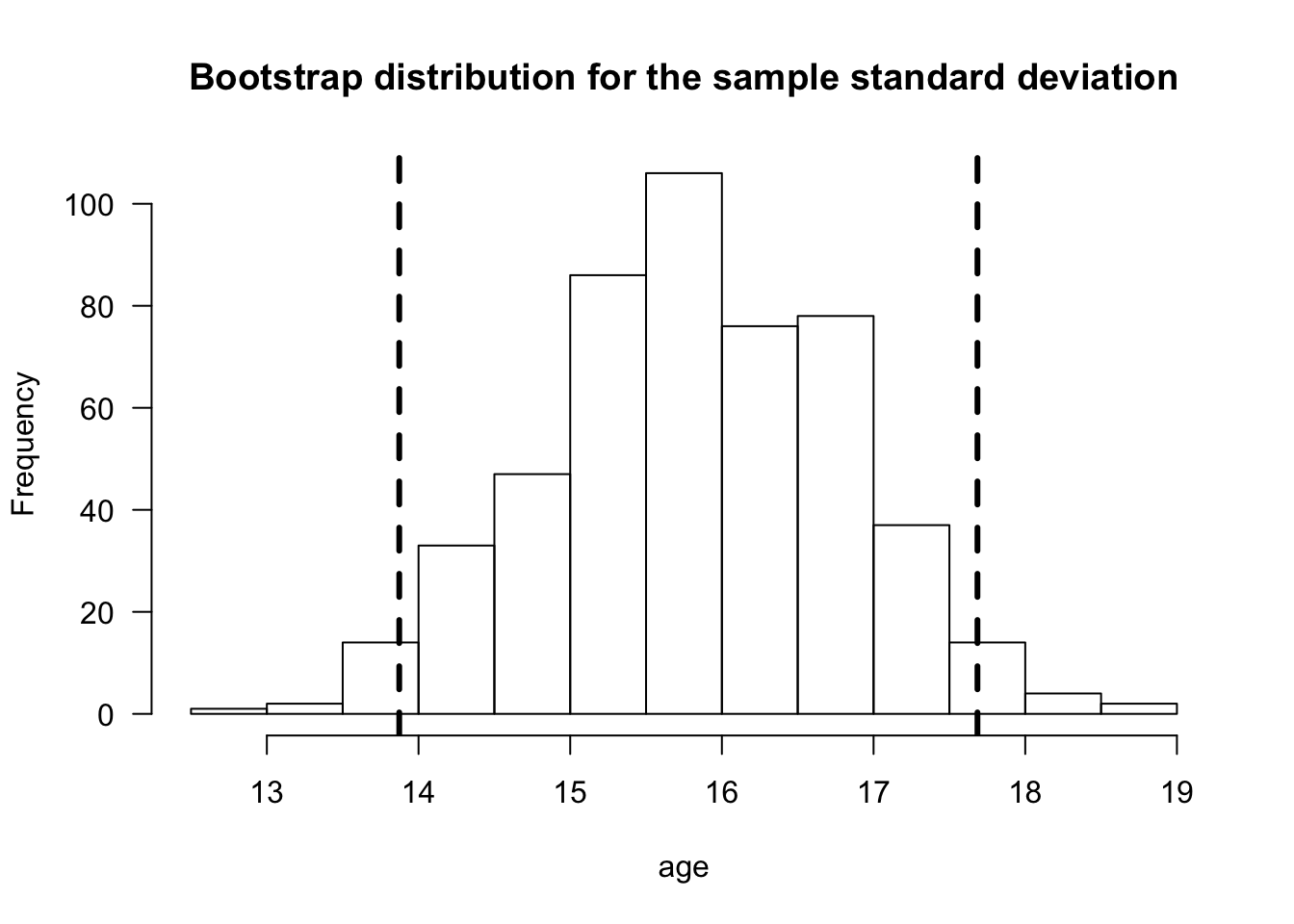
Figure 1.1: Bootstrap distribution of the sample standard deviation for the age variable from the kidney fitness data. Dashed vertical lines are placed at the 2.5 and 97.5 percentiles of the bootstrap distribution.
1.6 Example 4: Nonparametric Regression with a Single Covariate
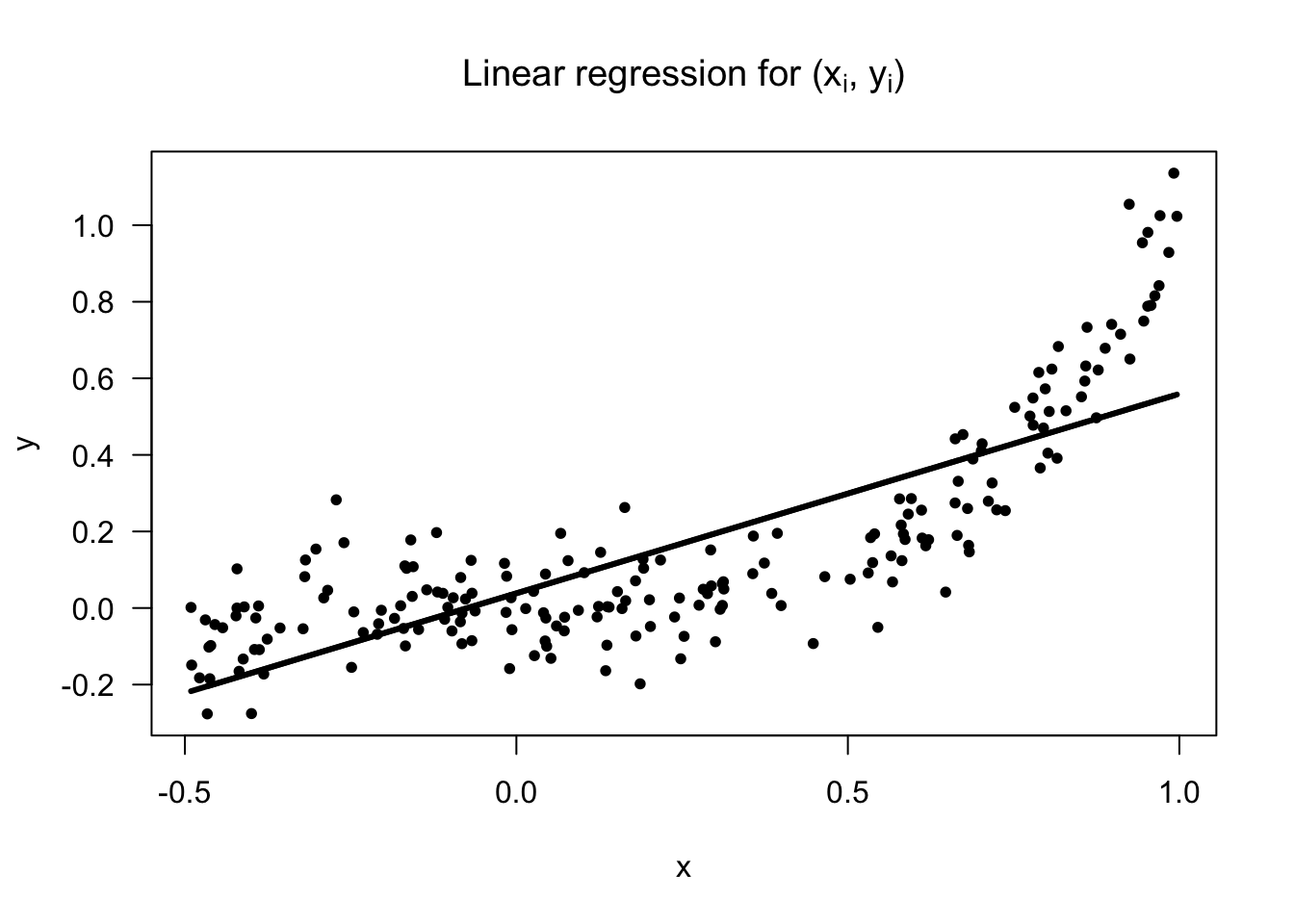
Regression is a common way of modeling the relationship between two different variables.
Suppose we have \(n\) pairs of observations \((y_{1}, x_{1}), \ldots, (y_{n}, x_{n})\) where \(y_{i}\) and \(x_{i}\) are suspected to have some association.
Linear regression would assume that these \(y_{i}\) and \(x_{i}\) are related by the following \[\begin{equation} y_{i} = \beta_{0} + \beta_{1}x_{i} + \varepsilon_{i} \end{equation}\] with the assumption \(\varepsilon_{i} \sim \textrm{Normal}(0, \sigma^{2})\) often made.
In this model, there are only 3 parameters: \((\beta_{0}, \beta_{1}, \sigma^{2})\), and the number of parameters stays fixed for all \(n\).
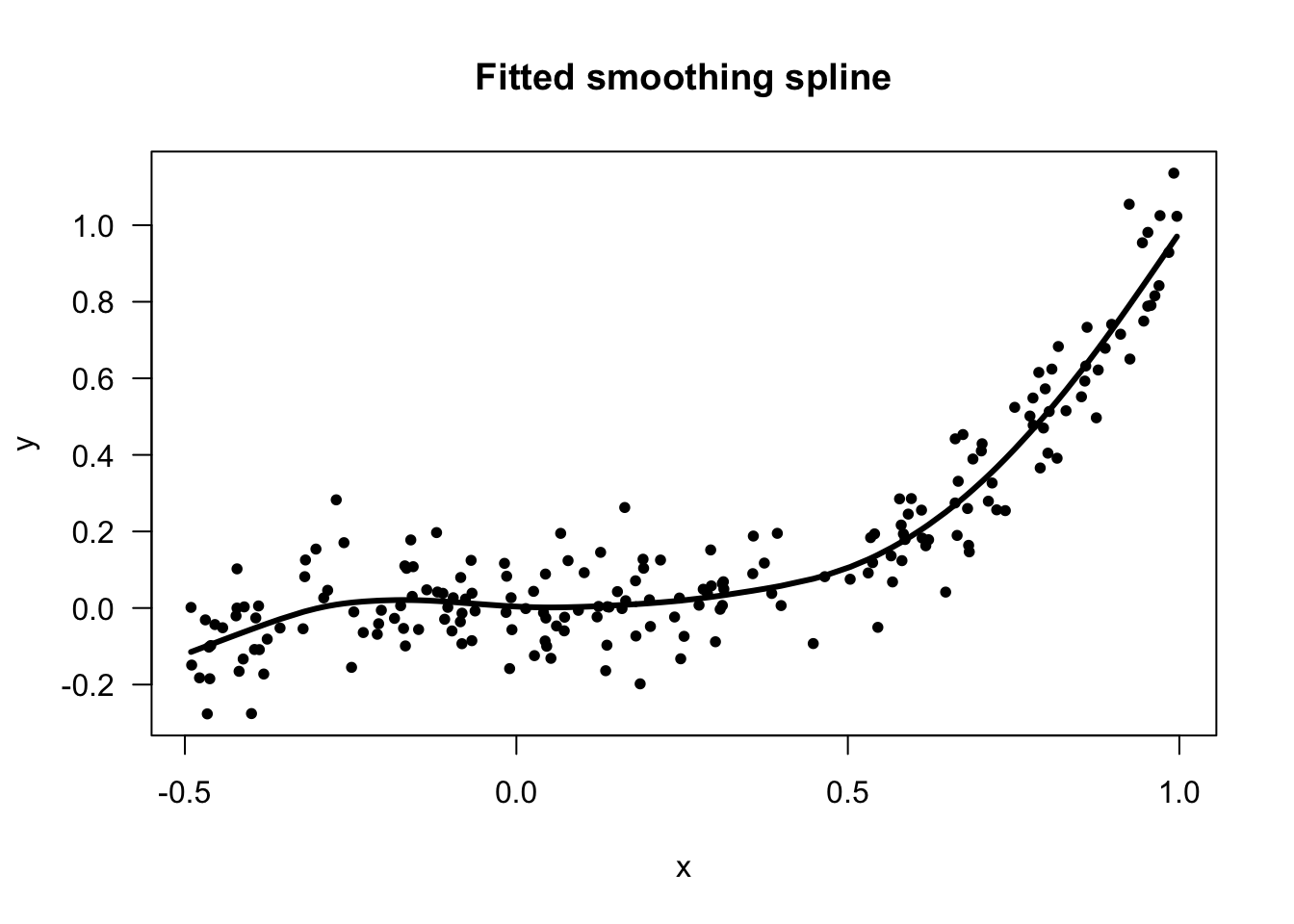
The nonparametric counterpart to linear regression is usually formulated in the following way \[\begin{equation} y_{i} = m( x_{i} ) + \varepsilon_{i} \end{equation}\]
Typically, one makes very few assumptions about the form of the mean function \(m\), and it is not assumed \(m\) can be described by a finite number of parameters.
There are a many nonparametric methods for estimating \(m\).
One popular method is the use of regression splines.
With regression splines, one considers mean functions of the form \[\begin{equation} m(x) = \sum_{j=1}^{q_{n}} \beta_{j}g_{j}(x) \tag{1.3} \end{equation}\] where \(g_{1}, \ldots, g_{n}(x)\) are a collection of cubic spline basis functions.
The number of basis functions \(q_{n}\) will depend on how many spline knots are chosen.
The number of basis functions \(q_{n}\) can definitely change with the sample size.
Choice of number of knots involves trading off bias and variance appropriately.
As in usual linear regression, estimates of the basis function weights \(\beta_{j}\) are found by minimizing residual sum of squares \[\begin{equation} \textrm{minimize} \quad \sum_{i=1}^{n} \Big( y_{i} - \sum_{j=1}^{q_{n}} \beta_{j}g_{j}( x_{i} ) \Big)^{2} \tag{1.4} \end{equation}\]
Using coefficient estimates \(\hat{\beta}_{1}, \ldots, \hat{\beta}_{n}\) found from solving (1.3), the nonparametric estimate of the mean function is defined as \[\begin{equation} \hat{m}(x) = \sum_{j=1}^{q_{n}} \hat{\beta}_{j}g_{j}(x) \end{equation}\]
While the estimation in (1.4) resembles parametric estimation for linear regression, notice that the number of parameters to be estimated can change with the sample size.
Allowing the number of basis functions to grow with \(n\) is important.
- For a sufficiently large number of basis functions, one should be able to approximate the true mean function \(m(x)\) arbitrarily closely.
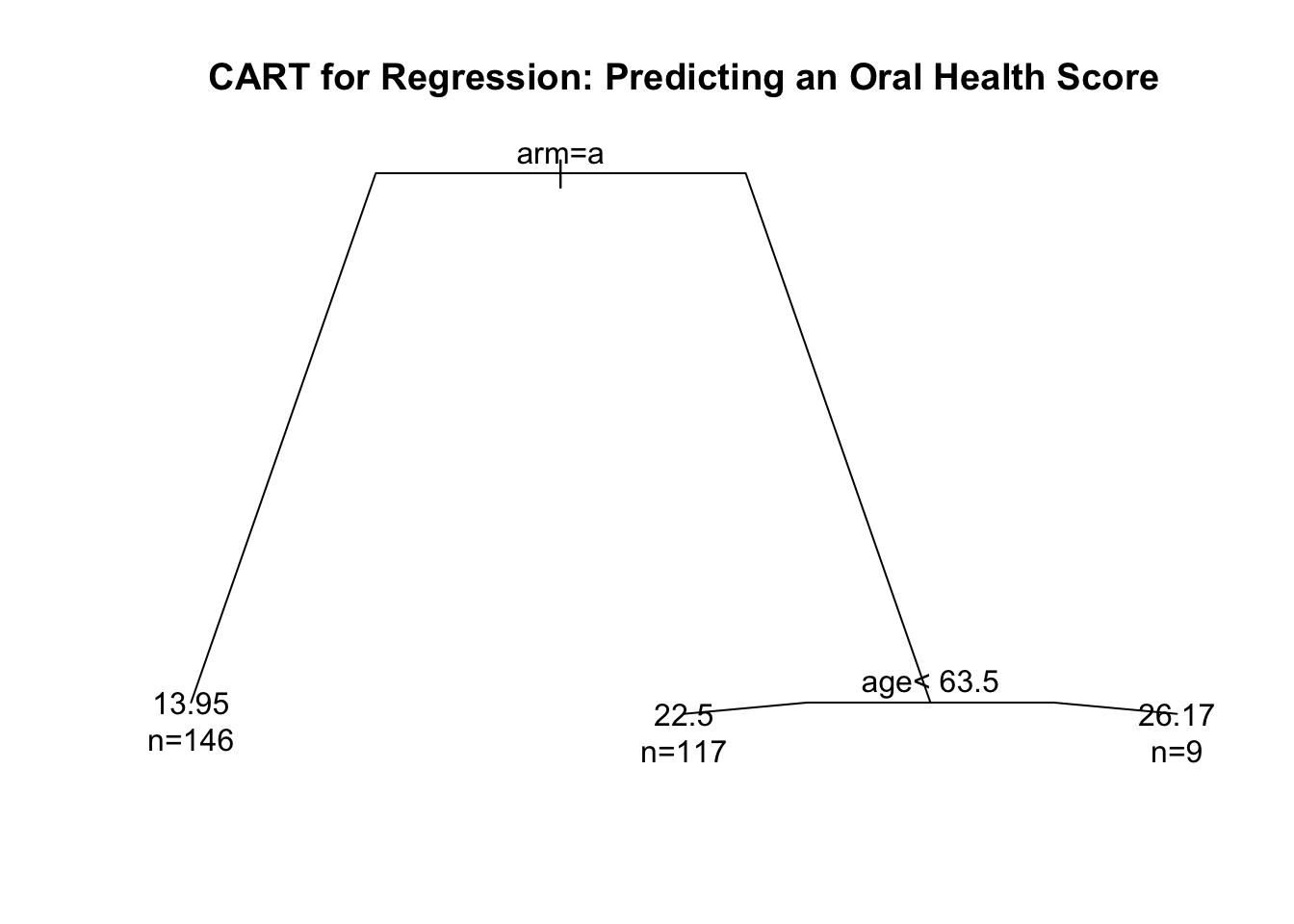
1.7 Example 5: Classification and Regression Trees (CART)
Suppose we now have observations \((y_{1}, \mathbf{x}_{1}), \ldots, (y_{n}, \mathbf{x}_{n})\) where \(y_{i}\) is a continuous response and \(\mathbf{x}_{i}\) is a p-dimensional vector of covariates.
As \(p\) increases, multivariate regression splines quickly run into problems.
- The number of basis functions increases exponentially as \(p\) increases.
As covariate dimension increases, need methods which automatically handle this in some way.
Regression trees are another nonparametric approach for predicting \(y_{i}\) from \(\mathbf{x}_{i}\).
Here, the regression function is a decision tree rather than a smooth fitted curve.
With a decision tree, a final prediction from a covariate vector \(\mathbf{x}_{i}\) is obtained by answering a sequence of “yes or no” questions.
When the responses \(y_{i}\) are binary, such trees are referred to as classification trees. Hence, the name: classification and regression trees (CART).
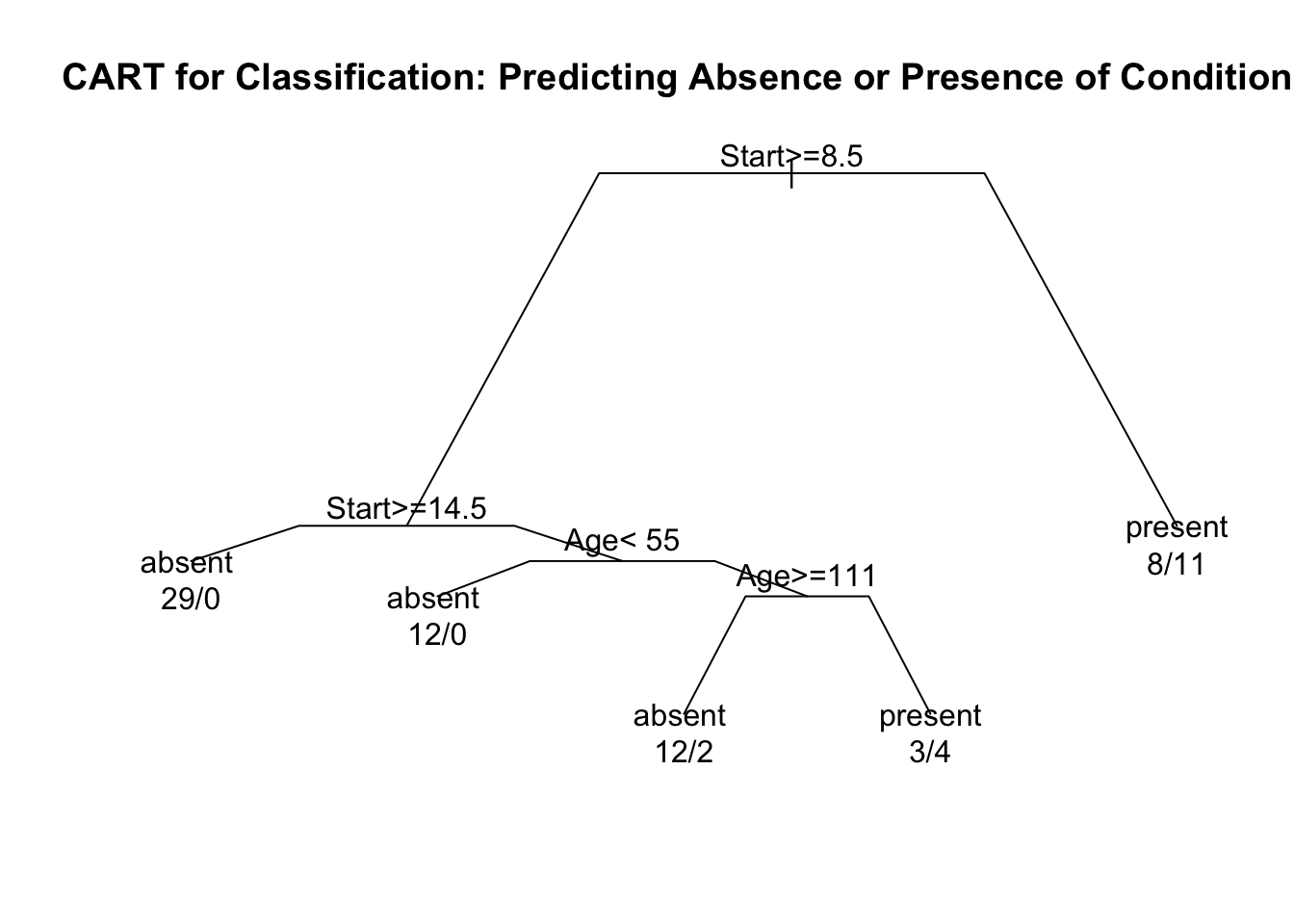
Classification and regression trees are constructed through recursive partitioning.
Recursive partitioning is the process of deciding if and how to split a given node into two child nodes.
Tree splits are usually chosen to minimize the “within-node” sum of squares.
The size of the final tree is determined by a process of “pruning” the tree with cross-validation determining the best place to stop pruning.
Regression trees are an example of a more algorithmic approach to constructing predictions (as opposed to probability modeling in more traditional statistical methods) with a strong emphasis on predictive performance as measured through cross-validation.
While single regression trees have the advantage of being directly interpretable, their prediction performance is often not that great.
However, using collections of trees can be more effective for prediction and has been used in many popular learning methods. Examples include: random forests, boosting, and Bayesian additive regression trees (BART).
Methods such as these can perform well on much larger datasets. We will discuss additional methods if time allows.